先日のPIDに関する記事の補足になります。お家コースをUR65で楽しむにあたり、もしPIDをいじるなら。PIDとか操作周りは好みの部分が大きいので稀にですが、たまに友達に勧めるのがYAWをいじるのをまず勧めます。大前提として、家の中をコースにしてスターウォーズのあのシーン的に椅子の間やらテーブルの下をすり抜けて遊ぶには断然Angleモードが一番楽しいです。その前提で、狭い空間において角をキビキビと曲がるにはYAWでの旋回が重要かと思っております。角です。カーブじゃなくて角。
ご存知Quadmovor、彼の映像を初めて見た時に気がついたのですが、そもそもドローンには「前」という概念が存在しないんだなーと。存在しないというか必要ないというか。でも我々が前を設定する理由は、要は「我々が視覚情報を必要としている」から。視覚情報に頼って飛ばすしか術のない我々だからこそ、視覚情報をいち早く取得することがFPVを飛ばす上ではとても重要なのだと。向かう先にいち早くカメラを向けてあげることが。そんなこともあり、YAWがシックリ来ていないかも?という指標として、飛ばしている内によく頭が(首が?)曲がっていくのをご存知かと思います。首が曲がっていく、すなわち自分のイメージ通りに機体が回っていない、自分の首を曲げて覗きに行ってしまう状態。機体が自分のイメージ通りに回っていれば、あまり頭が曲がらないと。
当然好みにはなりますが、狭いコースを楽しむ上でのコツ。イメージ通りにキビキビと機体が旋回できるYAWのPIDを見つけるには。完全なる感覚的描写で失礼します。私の認識として
P:スティックを入れた瞬間のレスポンス
I:余韻の具合、スティックのミッドレンジに対する反応
というイメージです。もちろん原理はこの通りでは無いかもですが、数字を変えて受ける体感はこんな感じです。
Betaflight3.3のデフォルトの数値が下記になります。
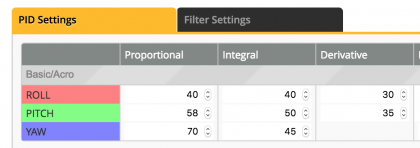
大抵は、家の中をキビキビ飛ばすには、言葉の通り「キビキビ具合」が必要ですので、まずPを10くらい上げてみてください。なので80。するとスティックを入れた瞬間から機体が回り始めます。何となくPが何をしてくれるのかが感覚としてつかめると思います。そして次にIを20くらい下げててみてください。45-20=25でしょうか。するととんでもなく「余韻が無い」状態になると思います。要はスティックを入れた分しか旋回しない状態。沢山旋回させるにはスティックを連打する羽目になると思います。一番分かりやすいのが、Orbit(オービット?軌道?衛生みたいな動き)的な旋回ができなくなります。
この体験をすると、何が何の機能を果たしているかが、大分直感的につかめると思います。
ちなみにPを10位上げると、飛ばしている最中に大抵は頭が曲がらなくなります。スティック操作に対してかなりダイレクトに機体が回転するので、首を曲げて覗きに行く動きが減ると思います。ここからは自分の好みですので一番心地いい数字まで歩み寄ってみてください。余りに余韻がなく、キビキビし過ぎていると逆に飛ばしにくいので、先程下げたIを少し戻してあげて、機体が程よく滑る程度に調整してみる感じでしょうか。ちなみに私はP:80のI:35です。キビキビ回るけど、旋回(Orbit)もできる数字。
Share your thoughts