何とか客観的に違いを伝える術がないものかと思い。。。試してみたものの。。。むむむむ。Tiny Whoopレベル、0603モーターレベルの出力だとそこまで数字としての違いが見えてこないかも・・・。
取り急ぎ共有しておきますが。。。
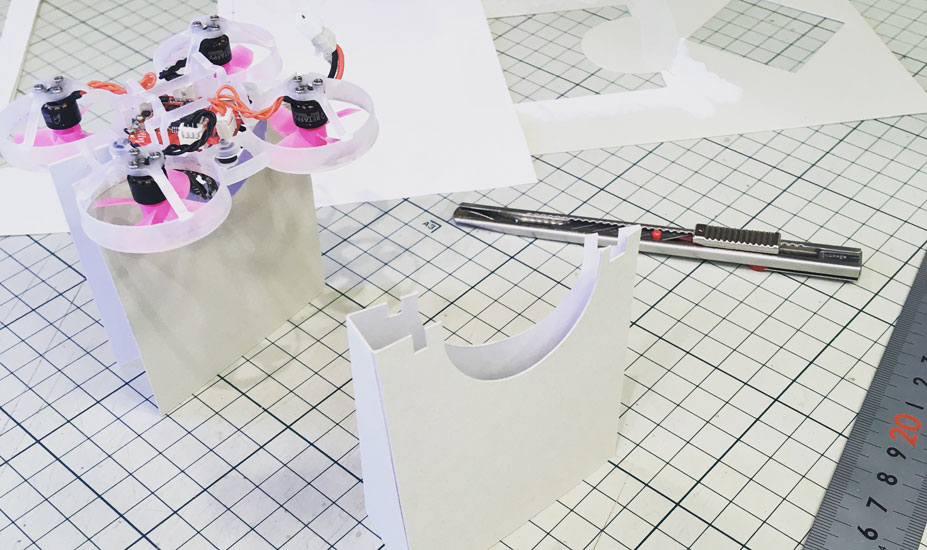
糊付け(私はテープのり使ってます。楽なので。)1箇所だけであとは折って作れます。曲線部分はカットが面倒だったら適当に機体にぶつからない形状であれば直線で切り欠いてしまっても問題ないかと。何となくまとまり感的に曲線にしてしまっただけです。。。
BetaFPV 1mmシャフト 19,000kvにKingkong Props
MAX値:48g
収束値(およそ):41gUR65 0.8mmシャフト 17,000kvにKingkong Props
MAX値:48g
収束値(およそ):38gBetaFPV 1mmシャフト 19,000kvにEachineプロップ
MAX値:48g
収束値(およそ):41gUR65 0.8mmシャフト 17,000kvにEachineプロップ
MAX値:49g
収束値(およそ):45g
(※バッテリー数本ずつ試してある程度平均をとりました。)
コレは。。。面白い!けど。。。観察しているに一番モーターの使い心地に関係するのはスロットルを入れた瞬間からパワーがピークに到達するまでの時間かな〜・・・なんて思いました。と、後はピークから少し収束した段階での力か。やっぱりUR65デフォルトモーターにEachineプロップが優秀な理由が数字でも分かります。でも個人的にはUR65にKingkong(TBS)プロップが一番楽しくて好き。
ちなみに補助輪を直接ペタっと計りに貼って使うという方法もあるにはあります✊
はじめました。というかそもそも何か理由があってやってなかった気がしたけど。。。その理由が思い出せない。。。まぁ忘れたので始めました。
Share your thoughts